PIC: Permutation Invariant Critic for Multi-Agent Deep Reinforcement Learning
Iou-Jen Liu* Raymond A. Yeh* Alexander G. Schwing
University of Illinois Urbana-Champaign
Abstract
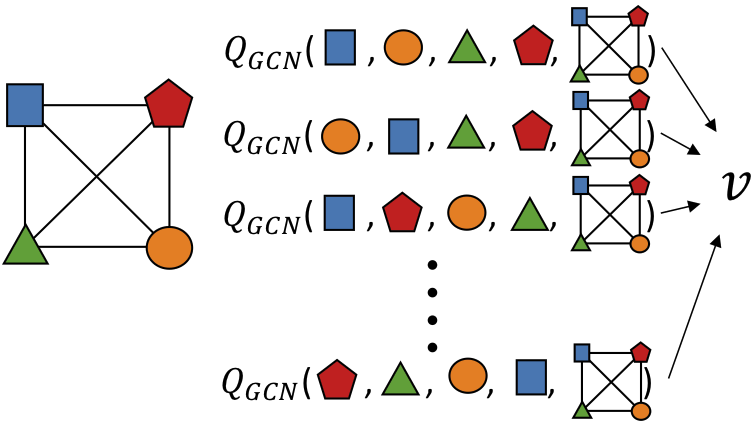
Sample efficiency and scalability to a large number of agents are two important goals for multi-agent reinforcement learning systems. Recent works got us closer to those goals, addressing non-stationarity of the environment from a single agent's perspective by utilizing a deep net critic which depends on all observations and actions. The critic input concatenates agent observations and actions in a user-specified order. However, since deep nets aren't permutation invariant, a permuted input changes the critic output despite the environment remaining identical. To avoid this inefficiency, we propose a 'permutation invariant critic' (PIC), which yields identical output irrespective of the agent permutation. This consistent representation enables our model to scale to 30 times more agents and to achieve improvements of test episode reward between 15% to 50% on the challenging multi-agent particle environment (MPE).
Materials


Presentation
Citation
@inproceedings{LiuCORL2019,
author = {I.-J. Liu$^\ast$ and R.~A. Yeh$^\ast$ and A.~G. Schwing},
title = {PIC: Permutation Invariant Critic for Multi-Agent Deep Reinforcement Learning},
booktitle = {Proc. CORL},
year = {2019},
note = {$^\ast$ equal contribution},
}